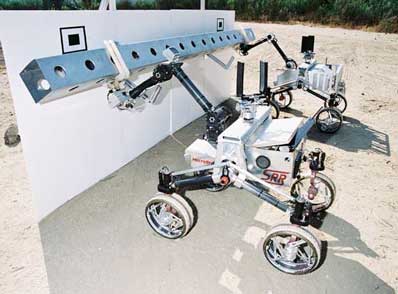
Pracownicy NASA zaprezentowali pierwsze użycie łazików zwanych rovers (włóczęga), które wspólnie wykonywały zadania, takie jak: skoordynowane chwytanie, podnoszenie i poruszanie się z ładunkami przez różnego rodzaju przeszkody terenowe.
“Pracująca załoga robotów zachowywała się w sposób przypominający ludzką pracę np. podczas budowy domu. Pojazdy można by porównać do dwóch robotników transportujących długą, ciężką belkę przez miejsca wzmożonej pracy ” – powiedział Paul Schenker, nadzorca grupy mechaniki i robotyki (Mechanical and Robotics Group), główny badacz dla NASA Jet Propulsion Laboratory (JPL) w Pasadenie w Kalifornii.
“Każdy łazik, tak jak każdy pracownik budowy, ma zróżnicowane sposoby przenoszenia małych rzeczy” – wyjaśnia Schenker. “Trik polega na tym, aby te poszczególne możliwości połączyć, skoordynować i dzięki nim móc trasportować większe rzeczy. Roboty muszą podzielić pracę przy ładowaniu, przenoszeniu. Muszą także wspólnie “myśleć” – wymieniać ważne wskazówki i szybko koordynować swoje wzajemne ruchy.“
Podczas testów w JPL roboty, których przyszłość związana jest z eksploracją Marsa, zostały wykorzystane do ustawienia symulowanych źródeł energii przetwarzających energię słoneczną.
Podczas testów, w których symulowano rozmieszczenie słonecznych źródeł energii, dwa skoordynowane roboty zbliżyły się, chwyciły i przetransportowały 2,5-metrową belkę na dystansie 50 metrów.
Łaziki potrafią podróżować przez bardzo trudne tereny. Wizualnie wykrywają i śledzą swoje cele, a także identyfikują objekty na swej drodze i pracują zbiorowo, aby uniknąć przeszkody.
Oprogramowanie zwane Control Architecture for Multi-robot Planetary Outposts jest “podzielnym mózgiem”, który obsługuje roboty. “ Roboty wymieniają między sobą dane zebrane przez “narządy zmysłów” i kontrolują zachowania w niespodziewanych, szybko zmieniających się warunkach środowiskowych, aby osiągnąć cel” – powiedział Terry Huntersberg, inżynier w JPL, który wraz z Paolo Pirjaninem kierował tworzeniem oprogramowania przeznaczonego do kontroli robotów.” Możemy łatwo dodać nowe zachowania do aktualnie już istniejących w programie. Mogą one być proste bądź bardziej złożone od tych wprowadzonych na początku.“
“Marsa i Ziemię dzielą setki milionów kilometrów, dlatego też bardzo trudno jest przewidzieć każdy scenariusz – każdy obiekt, skałę czy wzniesienie, które spotka podróżujący robot.” – powiedział Schenker. “Ale jest możliwość dania dwóm albo większej ilości robotów zestawu instynktownych reakcji, podzielnej sieci czucia i kontrolowania oraz demokratycznego podejmowania decyzji. To umożliwi łazikom dokonywanie wyboru najlepszych strategii działania.“
Chociaż prace na projektem są jeszcze w początkowym stadium, niewątpliwie koordynacja działania robotów wydaje się być tym, co może ułatwić nam eksplorację Marsa. Oprogramowanie wykorzystane do obsługi robotów może także stać się przyszłością w kontrolowaniu statków znajdujących się na orbicie.