W dotychczas publikowanych w tej serii artykułów z mechaniki nieba szczegółowo omówione zostało rozwiązanie tzw. problemu dwóch ciał, czyli zagadnienia polegającego na znalezieniu trajektorii ruchu jednego ciała względem drugiego oraz dodatkowych zależności opisujących ten ruch, takich jak prawa Keplera.
Autorem artykułu jest Aleksander Łyczek
Problem trzech ciał
W praktyce bardzo często spotyka się układy złożone z więcej niż dwóch obiektów, jak chociażby nasz Układ Słoneczny i pozostałe układy planetarne co do których mamy pewność, że zawierają więcej niż jedną planetę, czy też układy wielokrotne gwiazd. Najlepszym przykładem jest leżący najbliżej Słońca układ gwiazd – α Centauri, złożony z dwóch gwiazd ciągu głównego (α Centauri A i B) o charakterystyce widmowej zbliżonej do naszej dziennej gwiazdy, oraz oddalonego od nich mniejszego towarzysza w postaci czerwonego karła, znanego powszechnie jako Proxima Centauri (α Centauri C).
Ze względu na znaczne oddalenie trzeciego składnika od dwóch głównych gwiazd – odległość Proximy od środka masy układu jest średnio około 1000 razy większa niż dystans między składnikami A i B – oraz jego prawie 10 razy mniejszą masę niż każda z pozostałych gwiazd, układ trzech ciał można de facto potraktować jako “podwójny układ podwójny”. Wpływ grawitacyjny składnika C na pozostałe dwa jest pomijalny w stosunku do siły ich wzajemnego oddziaływania, co pozwala w pierwszym, bardzo dobrym przybliżeniu, rozpatrywać osobno ruch składników A i B względem siebie oraz ruch Proximy wokół większych towarzyszy, zastępując ich pojedynczym obiektem o masie równej sumie mas tych gwiazd umieszczonym w środku masy układu.
W ogólnym jednak przypadku, w którym układ jest złożony z trzech lub więcej ciał, nie istnieje nawet przybliżone rozwiązanie analityczne układu równań różniczkowych opisujących ruch obiektów. Istnieje jedynie kilka szczególnych sytuacji w których trajektorie obiektów można opisać jawnym równaniem. Dotyczą one przede wszystkim układu trzech ciał, w którym najmniejszy obiekt jest dużo mniej masywny niż pozostałe dwa lub spełnione są pewne warunki odnośnie jego położenia. Bez wątpienia jednym z nich jest znaczne oddalenie trzeciego ciała od środka układu, jak to ma miejsce we wspomnianym już przypadku α Centauri, jednak analizując sytuację dokładniej, można znaleźć jeszcze parę punktów, w których jeżeli umieścimy małe ciało na początku ruchu, będzie można opisać jego trajektorię w sposób jawny.
Punkty Lagrange’a
Wspomniane na końcu wstępu punkty to tzw. punkty Lagrange’a, o których niektórzy Czytelnicy mogli już wcześniej słyszeć. Znane także jako punkty libracyjne, od łacińskiego słowa libra, oznaczającego wagę – wynika to z faktu, że w punktach tych następuje równowaga sił grawitacyjnych i bezwładności, dzięki czemu umieszczone w nich ciało nie zmienia swojego położenia względem pozostałych dwóch większych obiektów. Istnienie oraz zależności na położenie tych punktów zostały wyprowadzone po raz pierwszy w XVIII w. przez jednego z geniuszy epoki, francuskiego matematyka Josepha Lagrange’a. Przyjrzymy się teraz bliżej owemu wyprowadzeniu.
Załóżmy, że mamy dane dwa ciała o masach  oraz
oraz  okrążające środek masy po orbitach kołowych. Wprowadźmy układ współrzędnych o początku w środku masy układu i wraz z nim rotujący z prędkością kątową
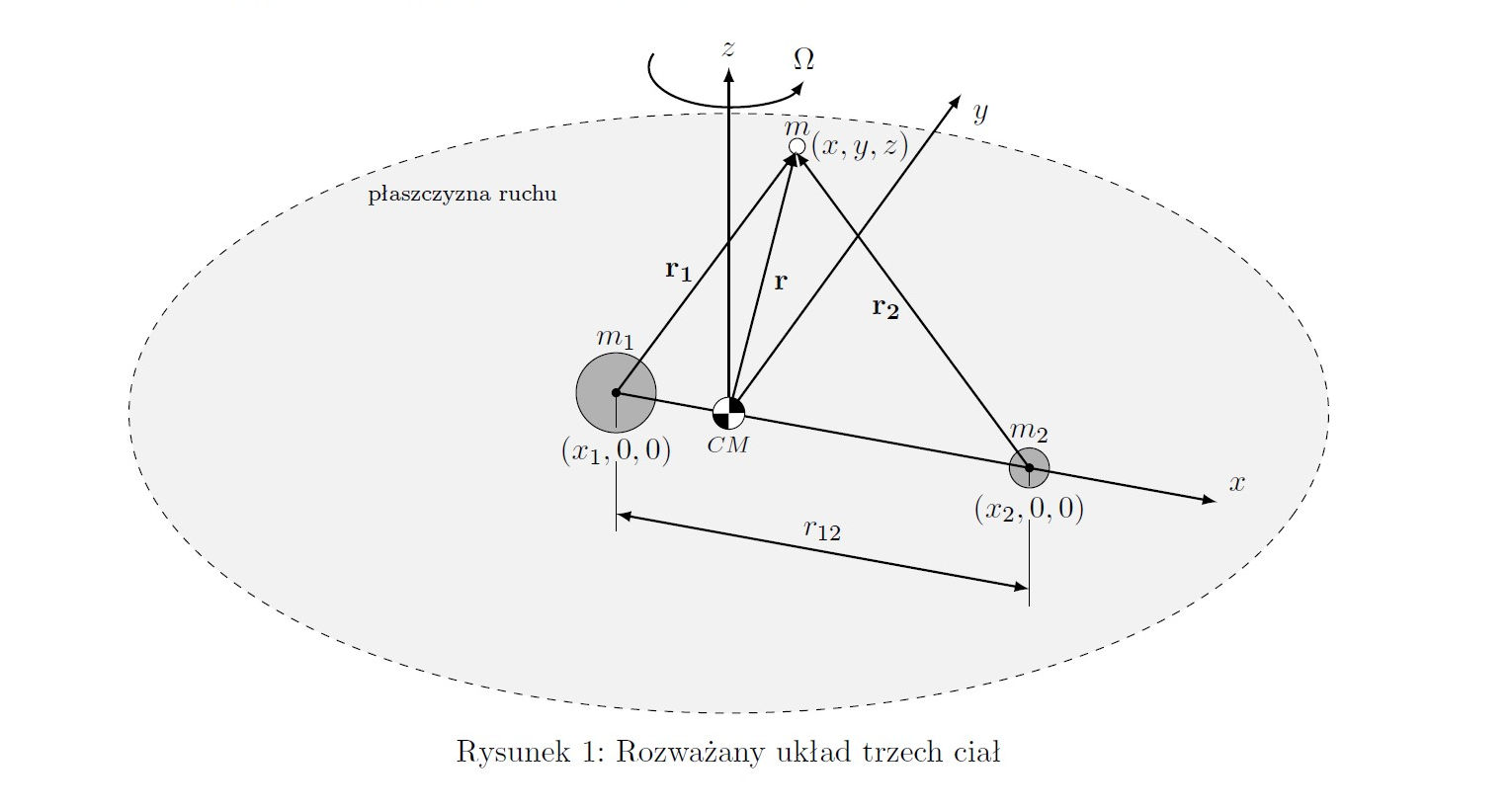
okrążające środek masy po orbitach kołowych. Wprowadźmy układ współrzędnych o początku w środku masy układu i wraz z nim rotujący z prędkością kątową  , aby oś X cały czas pokrywała się z prostą łączącą składniki 1 i 2. Płaszczyzna XY pokrywa się z płaszczyzną orbity, oś Z stanowi oś obrotu układu. Jest to układ nieinercjalny, co powoduje konieczność uwzględnienia w późniejszych rozważaniach siły bezwładności, którą w przypadku układów rotujących ze stałą prędkością kątową stanowią siła odśrodkowa oraz siła Coriolisa.
, aby oś X cały czas pokrywała się z prostą łączącą składniki 1 i 2. Płaszczyzna XY pokrywa się z płaszczyzną orbity, oś Z stanowi oś obrotu układu. Jest to układ nieinercjalny, co powoduje konieczność uwzględnienia w późniejszych rozważaniach siły bezwładności, którą w przypadku układów rotujących ze stałą prędkością kątową stanowią siła odśrodkowa oraz siła Coriolisa.
 Aleksander Łyczek
Aleksander Łyczek W tak zdefiniowanym układzie ciała i zlokalizowane są odpowiednio w punktach  oraz
oraz  . Wprowadźmy trzecie ciało o masie
. Wprowadźmy trzecie ciało o masie  (
( ) w dowolnym punkcie o współrzędnych
) w dowolnym punkcie o współrzędnych  , którego początkowy wektor położenia wynosi
, którego początkowy wektor położenia wynosi ![\mathbf{r}=[x,y,z]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-12831a6c6d8c89ba0ebe23dfafe41fdf_l3.svg "Rendered by QuickLaTeX.com") względem środka masy układu (wektory będą dalej oznaczane poprzez pogrubienie tekstu) oraz
względem środka masy układu (wektory będą dalej oznaczane poprzez pogrubienie tekstu) oraz ![\mathbf{r_1}=[x-x_1,y,z]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-bede4acf0cc1a9cdb0c82b5eb4a764c7_l3.svg "Rendered by QuickLaTeX.com") oraz
oraz ![\mathbf{r_2}=[x-x_2,y,z]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-650fb646585ff888f6bdd3bd3a510d4d_l3.svg "Rendered by QuickLaTeX.com") względem odpowiednich składników układu. Rozważaną sytuację przedstawiono na rysunku 1.
względem odpowiednich składników układu. Rozważaną sytuację przedstawiono na rysunku 1.
Naszym celem jest wyprowadzenie równań ruchu ciała o masie , tzn. znalezienie zależności między położeniem  , prędkością
, prędkością  i przyspieszeniem ciała
i przyspieszeniem ciała  w czasie. Gwoli informacji dla mniej zaawansowanych czytelników, kropka nad oznaczeniem funkcji (a wektor położenia jest de facto funkcją czasu) oznacza jej pochodną po czasie, czyli tempo jej zmian. Nietrudno zauważyć, że w takim razie prędkość jest niczym innym jak pierwszą pochodną położenia po czasie, zaś przyspieszenie jest pochodną prędkości, a tym samym drugą pochodną położenia po czasie, stąd dwie kropki w oznaczeniu.
w czasie. Gwoli informacji dla mniej zaawansowanych czytelników, kropka nad oznaczeniem funkcji (a wektor położenia jest de facto funkcją czasu) oznacza jej pochodną po czasie, czyli tempo jej zmian. Nietrudno zauważyć, że w takim razie prędkość jest niczym innym jak pierwszą pochodną położenia po czasie, zaś przyspieszenie jest pochodną prędkości, a tym samym drugą pochodną położenia po czasie, stąd dwie kropki w oznaczeniu.
Zacznijmy od wyznaczenia prędkości kątowej, z którą obiegają się składniki 1 i 2. Orbita tych składników jest kołowa, zatem można zastosować wzór na prędkość kątową w ruchu po okręgu:
(1) 
gdzie  oznacza okres wzajemnego obiegu głównych składników. Można go wyznaczyć, korzystając z III prawa Keplera:
oznacza okres wzajemnego obiegu głównych składników. Można go wyznaczyć, korzystając z III prawa Keplera:
(2) 
Zatem
(3) 
Ciała i leżą na osi X, więc ich współrzędne  i
i  wynoszą 0. Współrzędne
wynoszą 0. Współrzędne  można wyznaczyć, wykorzystując zależność na położenie środka ciężkości:
można wyznaczyć, wykorzystując zależność na położenie środka ciężkości:
(4) 
Dodatkowo uwzględniając, że  , otrzymamy, że:
, otrzymamy, że:
(5) 
Aby otrzymać równanie ruchu mniejszego ciała, skorzystamy z drugiej zasady dynamiki Newtona, która głosi, że przyspieszenie obiektu jest wprost proporcjonalne do siły wypadkowej nań działającej i odwrotnie proporcjonalne do masy tego ciała:  . Zastanowić się zatem należy, jakie siły, uwzględniając także siły bezwładności, działają na ciało . Są to kolejno:
. Zastanowić się zatem należy, jakie siły, uwzględniając także siły bezwładności, działają na ciało . Są to kolejno:
- siły grawitacji od ciał i (minus wynika z faktu, że siły te są zwrócone przeciwnie do wektorów
 i
i  ):
):
(6)

- siły bezwładności, odśrodkowa
 oraz Coriolisa
oraz Coriolisa  :
:
(7)

Dla mniej zaawansowanych Czytelników, symbol ‘ ‘ oznacza tzw. iloczyn wektorowy, który dla wektorów trójelementowych
‘ oznacza tzw. iloczyn wektorowy, który dla wektorów trójelementowych ![\mathbf{v_1}=[a_1,b_1,c_1]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-ea44ba0702e4d82c35c40249f8b4c675_l3.svg "Rendered by QuickLaTeX.com") i
i ![\mathbf{v_2}=[a_2,b_2,c_2]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-bfc78812a42119e19f02fbc8fa0ec062_l3.svg "Rendered by QuickLaTeX.com") definuje się nastepująco:
definuje się nastepująco:
![\begin{equation*} \mathbf{v_1} \times \mathbf{v_2}=[b_1c_2-c_1b_2,c_1a_2-a_1c_2,a_1b_2-b_1a_2] \end{equation*}](https://astronet.pl/wp-content/ql-cache/quicklatex.com-5da90dfd7af4f0824df882f41a0603bd_l3.svg "Rendered by QuickLaTeX.com")
Ponieważ oś Z jest osią obrotu układu, wektor prędkości kątowej jest do niej równoległy, zatem ![\mathbf{\Omega}=[0,0,\Omega]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-da174c32c4b81ad095d1a6e0895c6b9a_l3.svg "Rendered by QuickLaTeX.com") . Podstawiając wszystkie wektory do równań od 6 do 7, otrzymamy:
. Podstawiając wszystkie wektory do równań od 6 do 7, otrzymamy:
(8) ![\begin{equation*} \mathbf{F_1}=-\frac{Gm_1 m}{r_1^3}[x-x_1,y,z]=-\frac{Gm_1 m}{r_1^3}[x+\pi_2 r_{12},y,z] \end{equation*}](https://astronet.pl/wp-content/ql-cache/quicklatex.com-c680bfabcc839b59bdbe1d4e2b0e2897_l3.svg "Rendered by QuickLaTeX.com")
(9) ![\begin{equation*} \mathbf{F_2}=-\frac{Gm_2 m}{r_2^3}[x-x_2,y,z]=-\frac{Gm_2 m}{r_2^3}[x-\pi_1 r_{12},y,z] \end{equation*}](https://astronet.pl/wp-content/ql-cache/quicklatex.com-6848bb617a0372c3b2036fd5720ee1bb_l3.svg "Rendered by QuickLaTeX.com")
(10) ![\begin{equation*} \mathbf{F_r}=-m[0,0,\Omega]\times([0,0,\Omega]\times[x,y,z])=m[0,0,-\Omega]\times[-\Omega y,\Omega x,0]=m[\Omega^2 x,\Omega^2 y,0] \end{equation*}](https://astronet.pl/wp-content/ql-cache/quicklatex.com-8740741bd10d487ce5e6c92304d4b1bb_l3.svg "Rendered by QuickLaTeX.com")
(11) ![\begin{equation*} \mathbf{F_c}=-2m[0,0,\Omega]\times [\dot{x},\dot{y},\dot{z}]=-2m[-\Omega \dot{y},\Omega \dot{x},0]=2m[\Omega \dot{y},-\Omega \dot{x},0] \end{equation*}](https://astronet.pl/wp-content/ql-cache/quicklatex.com-c76df5d9b49fe553114a7c4b1882daa6_l3.svg "Rendered by QuickLaTeX.com")
Równanie ruchu przyjmuje więc następującą postać:
(12) ![\begin{multline*} \mathbf{\ddot{r}}=[\ddot{x},\ddot{y},\ddot{z}]=\frac{\mathbf{F_1+F_2+F_r+F_c}}{m}=-\frac{Gm_1}{r_1^3}[x+\pi_2 r_{12},y,z]-\frac{Gm_2}{r_2^3}[x-\pi_1 r_{12},y,z]\\+[\Omega^2 x,\Omega^2 y,0]+2[\Omega \dot{y},-\Omega \dot{x},0] \end{multline*}](https://astronet.pl/wp-content/ql-cache/quicklatex.com-b99f5cb0be9255076024b2dfaaa1940d_l3.svg "Rendered by QuickLaTeX.com")
Rozpisując równania dla każdej z trzech składowych otrzymamy:
(13) 
Powyższy układ równań nie posiada ogólnego rozwiązania analitycznego, natomiast można go wykorzystać do znalezienia położenia punktów równowagi, w których prędkość i przyspieszenie ciała są zerowe, a tym samym zdaje się ono być w spoczynku względem głównych składników układu. Ciało umieszczone w takim punkcie, pozostanie w nim. Wstawiając warunki brzegowe:

do równań 13, otrzymujemy
(14) 
Z ostatniego równania wynika, że:
(15) 
a ponieważ oba wyrażenia w nawiasie, a tym samym ich suma, są dodatnie, równanie jest spełnione wtedy i tylko wtedy gdy  . Oznacza to, że punkty równowagi leżą w płaszczyźnie ruchu głównych składników.
. Oznacza to, że punkty równowagi leżą w płaszczyźnie ruchu głównych składników.
Do analizy równań 14 a) i b) przyda nam się dodatkowo spostrzeżenie, że  , czyli
, czyli  . Korzystając z tej wiedzy oraz równania 3, zakładając także
. Korzystając z tej wiedzy oraz równania 3, zakładając także  równania 14 a) oraz b) przedstawiają się następująco:
równania 14 a) oraz b) przedstawiają się następująco:
(16) 
Dokonując kilku przekształceń, otrzymujemy, że:
(17) 
Wstawiając wyrażenie z prawej strony równania 17b) w miejsce  w równaniu 17a), dostajemy:
w równaniu 17a), dostajemy:
(18) 
Grupując wyrażenia z tym samym mianownikiem, dostajemy:
(19) 
Ponieważ  oraz
oraz  , ostatnie równanie jest spełnione wtedy i tylko wtedy, gdy
, ostatnie równanie jest spełnione wtedy i tylko wtedy, gdy  . Wstawiając tę równość do równania 17b) dostaniemy ostatecznie, że
. Wstawiając tę równość do równania 17b) dostaniemy ostatecznie, że  , a tym samym
, a tym samym  . Oznacza to ni mniej, ni więcej, jak to, że wszystkie 3 ciała są położone w wierzchołkach trójkąta równobocznego. W płaszczyźnie orbity istnieją dwa takie punkty w których mozna umieścić ciało , aby tworzyło ono z głównymi składnikami trójkąt równoboczny. Punkty te zwyczajowo nazywa się punktami Lagrange’a numer 4 oraz 5, a oznacza przez
. Oznacza to ni mniej, ni więcej, jak to, że wszystkie 3 ciała są położone w wierzchołkach trójkąta równobocznego. W płaszczyźnie orbity istnieją dwa takie punkty w których mozna umieścić ciało , aby tworzyło ono z głównymi składnikami trójkąt równoboczny. Punkty te zwyczajowo nazywa się punktami Lagrange’a numer 4 oraz 5, a oznacza przez  i
i  .
.
Powstaje natomiast pytanie, co z punktami 1, 2 oraz 3? Otóż do tej pory zakładaliśmy, że . W przypadku, gdy  , otrzymujemy, że wektory położenia ciała względem głównych składników są równe
, otrzymujemy, że wektory położenia ciała względem głównych składników są równe ![\mathbf{r_1}=[x+\pi_2 r_{12},0,0]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-b69c984df6848c7b8d38dcd0bf5ce58b_l3.svg "Rendered by QuickLaTeX.com") oraz
oraz ![\mathbf{r_2}=[x-\pi_1 r_{12},0,0]=[x-(1-\pi_2) r_{12},0,0]](https://astronet.pl/wp-content/ql-cache/quicklatex.com-1ec0e0acc486b3e01b35551be7a43217_l3.svg "Rendered by QuickLaTeX.com") . Wynika z tego, iż
. Wynika z tego, iż  oraz
oraz  . W takim przypadku równanie 17a) przyjmie ostatecznie postać:
. W takim przypadku równanie 17a) przyjmie ostatecznie postać:
(20) 
Powyższe równanie można uprościć poprzez ubezwymiarowienie zmiennej , wprowadzając oznaczenie  . Jeżeli wyciągniemy
. Jeżeli wyciągniemy  przed każdy nawias i wartość bezwzględną , to lewa strona będzie wyglądać następująco:
przed każdy nawias i wartość bezwzględną , to lewa strona będzie wyglądać następująco:
(21) 
Zapis ten oznacza, że aby znaleźć brakujące punkty  ,
,  i
i  wystarczy wyznaczyć miejsca zerowe funkcji
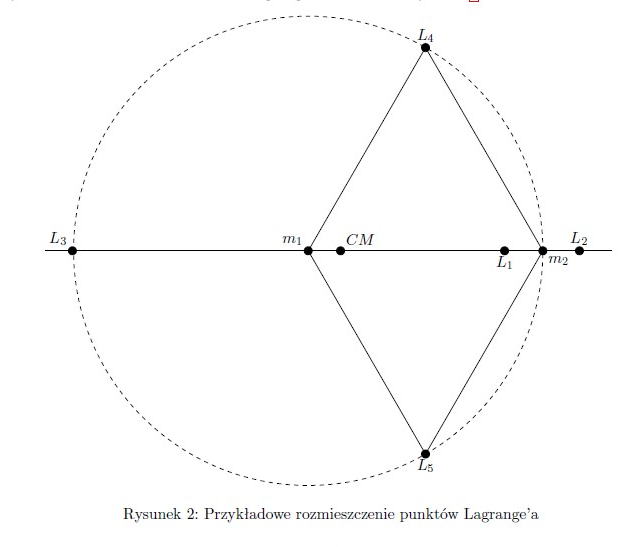
wystarczy wyznaczyć miejsca zerowe funkcji  , co jest możliwe do zrobienia jedynie metodami numerycznymi. Punkty te leżą na prostej łączącej główne składniki, a oznaczenia odpowiadają następującym lokacjom:
, co jest możliwe do zrobienia jedynie metodami numerycznymi. Punkty te leżą na prostej łączącej główne składniki, a oznaczenia odpowiadają następującym lokacjom:
- – punkt leżący pomiędzy głównymi składnikami,

- – punkt za mniejszym ciałem , patrząc od strony większego składnika ,

- – punkt za większym ciałem , patrząc od strony mniejszego składnika ,

Przykładowe rozmieszczenie punktów Lagrange’a przedstawia rysunek 2.
 Aleksander Łyczek
Aleksander Łyczek Analizując zachowanie funkcji można pokazać, że posiada ona dokładnie 3 miejsca zerowe spełniające powyższe warunki, co teraz uczynimy. Rozważania te przydadzą nam się później w zadaniach.
Na wstępie należy zauważyć, że punkty  oraz
oraz  nie należą do dziedziny funkcji. Dla pierwszego z nich mianownik członu
nie należą do dziedziny funkcji. Dla pierwszego z nich mianownik członu  przyjmuje wartość 0, zaś dla drugiego punktu to samo dzieje się z członem
przyjmuje wartość 0, zaś dla drugiego punktu to samo dzieje się z członem  (pamiętamy, że ). To już nam powoduje, że musimy rozpatrywać tę funkcję na trzech przedziałach:
(pamiętamy, że ). To już nam powoduje, że musimy rozpatrywać tę funkcję na trzech przedziałach:  ,
,  oraz
oraz  . Pokażemy, że jest monotoniczna w każdym z nich (na całej długości przedziału rośnie bądź maleje) oraz że wartości funkcji dla skrajnych punktów przedziałów leżą po przeciwnych stronach osi X. Oznacza to, że w danym przedziale funkcja przecina oś X w dokładnie jednym punkcie.
. Pokażemy, że jest monotoniczna w każdym z nich (na całej długości przedziału rośnie bądź maleje) oraz że wartości funkcji dla skrajnych punktów przedziałów leżą po przeciwnych stronach osi X. Oznacza to, że w danym przedziale funkcja przecina oś X w dokładnie jednym punkcie.
W tym przedziale oraz
oraz  , co implikuje równości
, co implikuje równości

Funkcja
przyjmuje zatem postać
Jeżeli
 , to mianowniki obu ułamków jako kwadraty dążą do
, to mianowniki obu ułamków jako kwadraty dążą do  , czyli same wyrażenia zbliżają się do zera. Ostatni człon natomiast będzie zmierzał do
, czyli same wyrażenia zbliżają się do zera. Ostatni człon natomiast będzie zmierzał do  , czyli , co równa się granicy całej funkcji w minus nieskończoności.Gdy
, czyli , co równa się granicy całej funkcji w minus nieskończoności.Gdy  , to ostatnie dwa człony się kasują (
, to ostatnie dwa człony się kasują ( , natomiast w pierwszym mianownik dąży do zera od dodatniej strony. Licznik także jest dodatni, zatem przez minus przed ułamkiem
, natomiast w pierwszym mianownik dąży do zera od dodatniej strony. Licznik także jest dodatni, zatem przez minus przed ułamkiem ![f_1(\xi)\xrightarrow[\xi \rightarrow -\pi_2]{}-\infty](https://astronet.pl/wp-content/ql-cache/quicklatex.com-c03bb3f24e5c7d68e7f4e1885bd6351a_l3.svg "Rendered by QuickLaTeX.com") .
.
Pokazaliśmy, że na krańcach przedziału funkcja dąży do przeciwnych nieskończoności, od dodatniej do ujemnej. Należy więc zatem udowodnić, że na całym przedziale jest ona malejąca, czyli dla dowolnych liczb rzeczywistych , takich że
, takich że  ,
,  . Nietrudno zauważyć, że jeżeli
. Nietrudno zauważyć, że jeżeli  , to
, to  . Dodatkowo wyrażenia
. Dodatkowo wyrażenia  ,
,  ,
,  ,
,  są wszystkie ujemne, co przy implikuje nierówności
są wszystkie ujemne, co przy implikuje nierówności  oraz
oraz  , z których z kolei łatwo można dojść do postaci
, z których z kolei łatwo można dojść do postaci  oraz
oraz  poprzez odwrócenie oraz przemnożenie obu stron przez odpowiednie liczby ujemne, pamiętając o zmianie znaku nierówności przy każdej operacji. Ostatecznie otrzymujemy, że
poprzez odwrócenie oraz przemnożenie obu stron przez odpowiednie liczby ujemne, pamiętając o zmianie znaku nierówności przy każdej operacji. Ostatecznie otrzymujemy, że
co dowodzi tego, ze funkcja
 jest malejąca na całym interesującym nas przedziale. W połączeniu z faktem o przeciwnych znakach wartości na krańcach przedziału wnioskujemy, że znajduje się w nim dokładnie jedno miejsce zerowe.
jest malejąca na całym interesującym nas przedziale. W połączeniu z faktem o przeciwnych znakach wartości na krańcach przedziału wnioskujemy, że znajduje się w nim dokładnie jedno miejsce zerowe.
W tym przedziale oraz
oraz  . Wynika z tego, iż:
. Wynika z tego, iż:

Funkcja
będzie wyglądać więc następująco:
Tym razem dla
,  dąży do , ponieważ mianownik pierwszego członu jest nieujemny, lecz tym razem nie ma znaku minus przed ułamkiem. Gdy
dąży do , ponieważ mianownik pierwszego członu jest nieujemny, lecz tym razem nie ma znaku minus przed ułamkiem. Gdy  , pierwszy i ostatni człon kasują się wzajemnie, zaś mianownik drugiego dąży do zera od dodatniej strony, lecz ze względu na minus przed ułamkiem, granicą funkcji w tym punkcie jest
, pierwszy i ostatni człon kasują się wzajemnie, zaś mianownik drugiego dąży do zera od dodatniej strony, lecz ze względu na minus przed ułamkiem, granicą funkcji w tym punkcie jest  .Pozostaje pokazać, że funkcja w tym przedziale jest także malejąca na całej jego długości. Ponownie zakładamy , co od razu daje nam nierówność .
.Pozostaje pokazać, że funkcja w tym przedziale jest także malejąca na całej jego długości. Ponownie zakładamy , co od razu daje nam nierówność .  jest znów ujemne na całym przedziale, co implikuje , a tym samym .
jest znów ujemne na całym przedziale, co implikuje , a tym samym .  jest tym razem dodatnie dla każdego
jest tym razem dodatnie dla każdego  , z czego wynika zależność
, z czego wynika zależność  , a po odwróceniu obu stron
, a po odwróceniu obu stron  . Możemy zatem napisać, iż
. Możemy zatem napisać, iż
Ponownie udowodniliśmy, że funkcja jest malejąca jest malejąca na całej długości i na jego krańcach przyjmuje wartości o przeciwnych znakach, zatem posiada w nim dokładnie jedno miejsce zerowe.

Dowód przebiega w zasadzie analogicznie jak w pozostałych dwóch przypadkach, tylko że tym razem zarówno oraz  , czyli zachodzą równości:
, czyli zachodzą równości:

Funkcja przybiera więc postać:

Znów wartość funkcji dąży do
na lewym końcu przedziału ze względu na środkowy człon oraz do na skraju prawym z powodu ostatniego członu. Podobnie też dowodzimy, że funkcja jest malejąca na całym przedziale, czyli posiada w nim dokładnie jedno miejsce zerowe.
Zadanie
Wyznacz położenie punktów , oraz w układzie Ziemia-Księżyc. Załóż, że orbita Księżyca wokół Ziemi jest okręgiem o promieniu  km, masa Ziemi wynosi
km, masa Ziemi wynosi  kg, zaś masa Księżyca
kg, zaś masa Księżyca  kg.
kg.
Wcześniej wspominaliśmy, że miejsca zerowe funkcji można wyznaczyć jedynie z wykorzystaniem metod numerycznych. Jednak istnieje jedna metoda, do której nie trzeba komputera, a wystarczy zwykły kalkulator naukowy. Metoda ta nazywa się metodą iteracji prostej i składa się z następujących kroków:
-
- Przekształcenie równania
 do postaci
do postaci  .
. - Wybranie pierwszego przybliżenia rozwiązania równania
 .
. - Obliczenie
 jako kolejnego przybliżenia.
jako kolejnego przybliżenia. - Powtarzanie procedury uzyskiwania kolejnych przybliżeń
 do momentu aż różnica między kolejnymi wynikami
do momentu aż różnica między kolejnymi wynikami  jest mniejsza niż ustalony przez nas próg błędu.
jest mniejsza niż ustalony przez nas próg błędu.
- Przekształcenie równania
Oczywiście funkcja  powinna także spełniać warunek
powinna także spełniać warunek  , aby uzyskać zbieżność rozwiązania. Z tego powodu poszukiwanie odpowiedniej może zająć trochę czasu i tak też jest w przypadku równań
, aby uzyskać zbieżność rozwiązania. Z tego powodu poszukiwanie odpowiedniej może zająć trochę czasu i tak też jest w przypadku równań  ,
,  oraz
oraz  . Narzucające się wręcz sprowadzenie tych równań do postaci:
. Narzucające się wręcz sprowadzenie tych równań do postaci:

nie zdaje egzaminu dla żadnej z trzech rozważanych funkcji, algorytm rozwiązywania jest rozbieżny dla takiego przekształcenia. Po odpowiednio długich poszukiwaniach udało się znaleźć funkcje  ,
,  oraz
oraz  (odpowiadające funkcjom
(odpowiadające funkcjom  o tym samym indeksie), dla których procesy iteracji są zbieżne. Równania, które chcemy rozwiązać, mają kolejno postać:
o tym samym indeksie), dla których procesy iteracji są zbieżne. Równania, które chcemy rozwiązać, mają kolejno postać:

Zanim przystąpimy do obliczeń, trzeba jeszcze wyznaczyć wartość  :
:

Rozwiązania uzyskiwane w kolejnych iteracjach przedstawiono w tabeli ??. Przy wybieraniu wartości startowej należy pamiętać, by należała ona do przedziału, w którym każda z funkcji jest zdefiniowana, tzn. dla  , dla
, dla  oraz dla
oraz dla  .
.
 |
( ) ) |
( ) ) |
( ) ) |
 |
-0,5 | 0,5 | 1,5 |
 |
-1,425525 | 0,720791 | 1,277064 |
 |
-0,84521 | 0,785519 | 1,207947 |
 |
-1,095564 | 0,813079 | 1,179347 |
 |
-0,962935 | 0,825724 | 1,166565 |
 |
-1,026688 | 0,831643 | 1,160714 |
 |
-0,994487 | 0,834429 | 1,158014 |
 |
-1,010361 | 0,835743 | 1,156763 |
 |
-1,00244 | 0,836362 | 1,156184 |
 |
-1,006369 | 0,836654 | 1,155915 |
 |
-1,004414 | 0,836792 | 1,15579 |
 |
-1,005385 | 0,836857 | 1,155732 |
 |
-1,004902 | 0,836888 | 1,155705 |
 |
-1,005142 | 0,836903 | 1,155693 |
 |
-1,005023 | 0,836909 | 1,155687 |
 |
-1,005082 | 0,836913 | 1,155684 |
 |
-1,005053 | 0,836914 | 1,155683 |
 |
-1,005067 | 0,836915 | 1,155682 |
 |
-1,00506 | 0,836915 | 1,155682 |
 |
-1,005064 | ||
 |
-1,005062 | ||
 |
-1,005063 | ||
 |
-1,005062 | ||
 |
-1,005063 | ||
 |
-1,005063 |
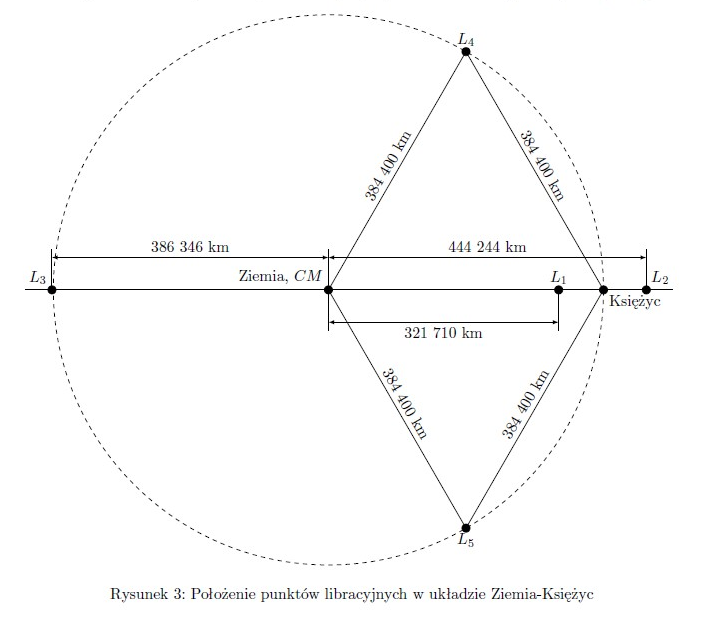
Punkty Lagrange’a , oraz układu Ziemia-Księżyc znajdują się zatem w następujących odległościach od środka masy składników:

Rozmieszczenie punktów libracyjnych zostało przedstawione na rysunku ??. Ze względu na położenie środka masy układu wewnątrz Ziemi, oba obiekty są reprezentowane na rysunku przez jeden punkt.
 Aleksander Łyczek
Aleksander Łyczek Podsumowanie
W powyższych rozważaniach udowodniliśmy teoretycznie istnienie punktów równowagi w układach dwóch ciał, w których można umieścić trzecie, dużo mniejsze ciało, aby nie zmieniało ono swego położenia względem głównych składników. Oczywiście istnienie punktów Lagrange’a zostało potwierdzone także empirycznie. Najlepszym przykładem na to są tzw. planetoidy trojańskie, czyli małe obiekty Układu Słonecznego ,,schwytane” w punktach oraz układu Słońce-Jowisz. W sumie w obu punktach znajduje się przeszło 10000 planetoid, spośród których największa ma rozmiar 370200 km. Ich zgrupowanie w punktach oraz wynika z faktu, że te punkty jako jedyne spośród wszystkich pięciu zapewniają równowagę stabilną, tzn. po wychyleniu obiektu w nich umieszczonego będzie chciał on powrócić w uprzednio zajmowane miejsce.
Godne wspomnienia są także punkty oraz układu Słońce-Ziemia. Ze względu na bliskość Ziemi oraz właśnie niestabilną równowagę, która sprawia, że nie zalegają w nich pył oraz inne ,,kosmiczne śmieci”, są świetnym miejscem do umieszczania w nich naukowych misji kosmicznych. Punkt stanowi idealną lokację dla sond zajmujących się obserwacją Słońca, zaś punkt dla tych badających głęboki kosmos.